

ZEISS kvalitetsprogramvare
Utforsk programvareløsningene våre – fra inspeksjon til datahåndtering
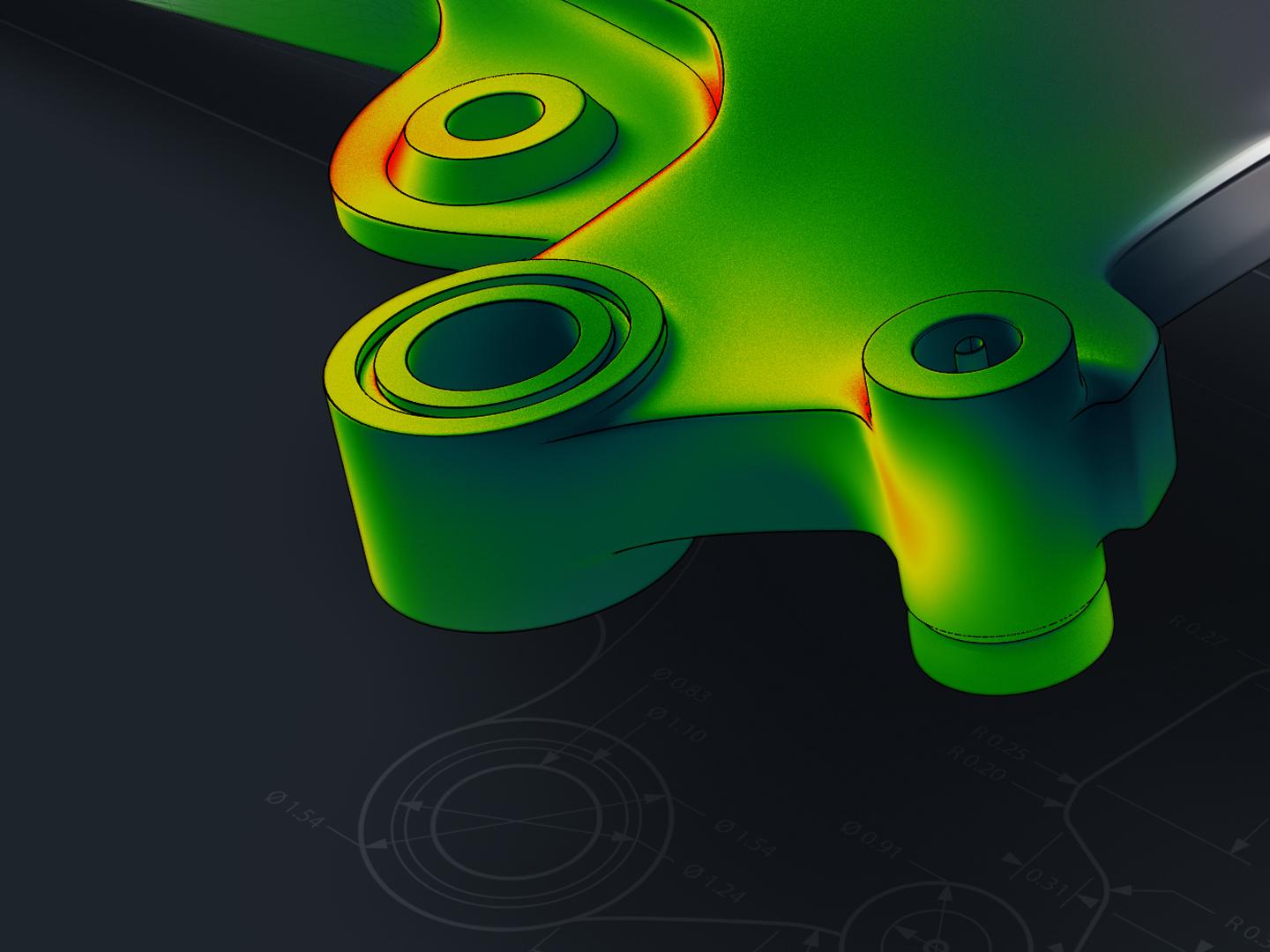
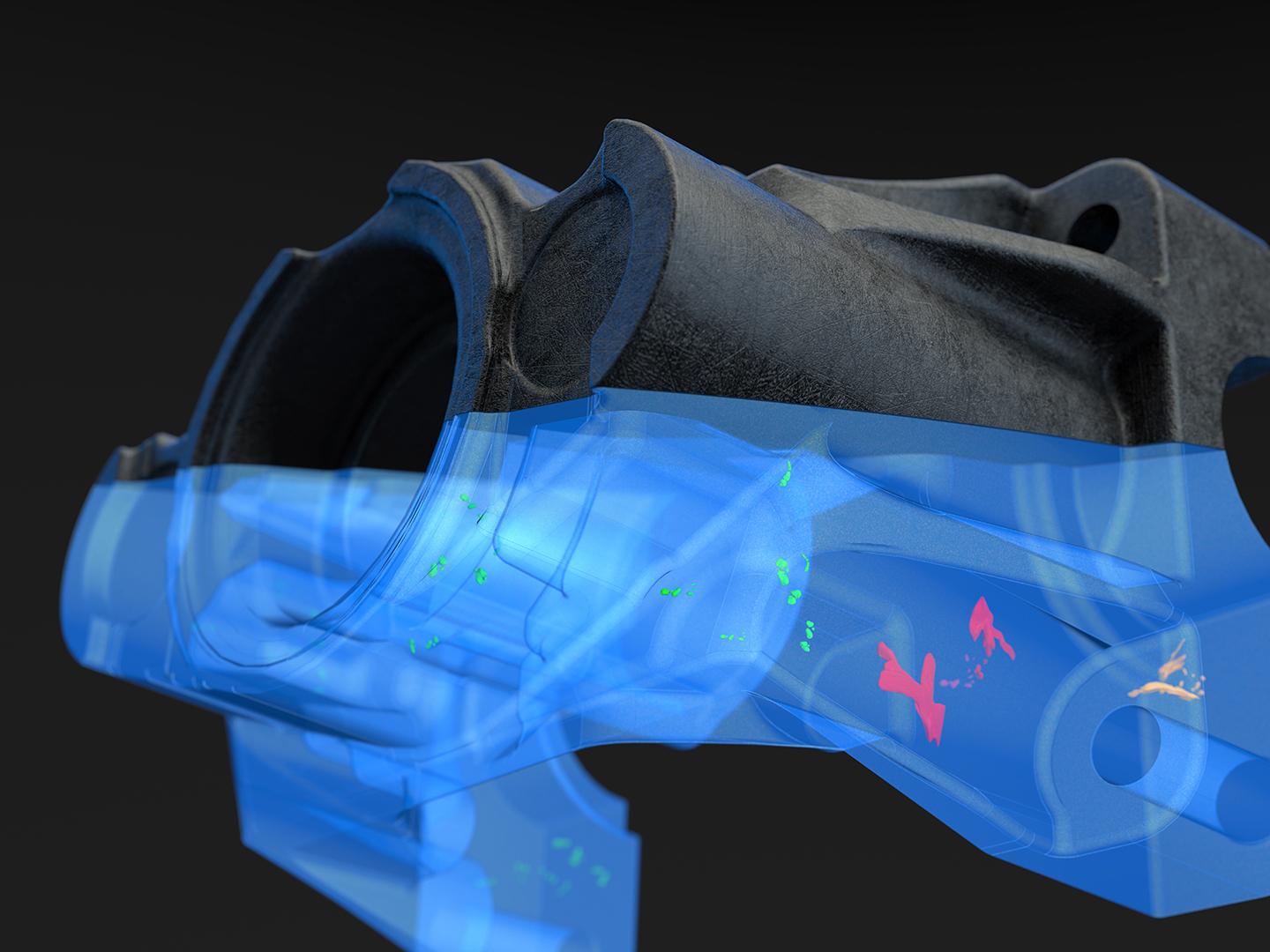
Høy fleksibilitet kombinert med analyser med høy presisjon
Høy kvalitet i produksjonsprosessen? Ganske enkelt, hvis du har de riktige verktøyene. Med ZEISS Quality Software kan du analysere komponentene dine nøyaktig og intuitivt. Avhengig av behovene dine kan du opprette dataevalueringer, analyser og rapporter på tvers av teknologier og systemer for en helhetlig kvalitetsstyring
Programvare til måleteknikk og inspeksjon


















Programvare til data- og kvalitetsstyring








Tjenester
Dra nytte av våre helhetlige tjenester: Med vårt omfattende opplæringsprogram og andre tjenester som ekspertforumet, programvarestøtte eller nettbasert hjelp, kan du kontinuerlig forbedre resultatene dine i ZEISS Quality Software. Med en vedlikeholdsavtale til programvare er du alltid oppdatert med den nyeste måleprogramvaren for maksimal produktivitet.








VANLIGE SPØRSMÅL
-
Du finner mer informasjon om ZEISS Quality Suite her.
Denne lenken fører deg til direkte nedlasting. -
For tiden har du tilgang til den komplette ZEISS INSPECT-løsningen samt ZEISS PiWeb, ZEISS CORRELATE, ZEISS REVERSE ENGINEERING og ZEISS CALIGO via ZEISS Quality Suite
-
Med en ZEISS Software Maintenance Agreement (SMA) kan du og bedriften din dra nytte av tilleggstjenester til å frigjøre maksimal ytelse fra ZEISS-systemene dine og unngå nedetid på maskinen. Regelmessige programvareoppdateringer er en forutsetning til fremtidssikre prosesser. ZEISS programvarevedlikehold garanterer langsiktig kvalitet og gir mange andre fordeler. Du er alltid oppdatert med den nyeste måleprogramvaren for maksimal produktivitet, og du sparer tid med planleggbare og forutsigbare oppgraderingsinstallasjoner.
-
Du kan også bruke ulike ZEISS Quality Software-produkter uten et ZEISS-system. Analyseprogramvaren vår er uavhengig av måleutstyret. Med ZEISS INSPECT, til eksempel, kan du evaluere og analysere dine optiske 3D- eller volumdata, uansett kilde, og opprette omfattende rapporter. ZEISS PiWeb fungerer uavhengig av måleteknologien og integrerer til og med manuelle målinger
-
Ja, selvfølgelig. Du kan få ZEISS Quality Suite gratis her. Du kan også teste mange av våre programvarevarianter i en periode, til eksempel ZEISS INSPECT. Du kan motta og aktivere testlisensen i ZEISS Quality Suite